DJI-A2飞控系统用户手册
DJI-A2调参软件视频教程
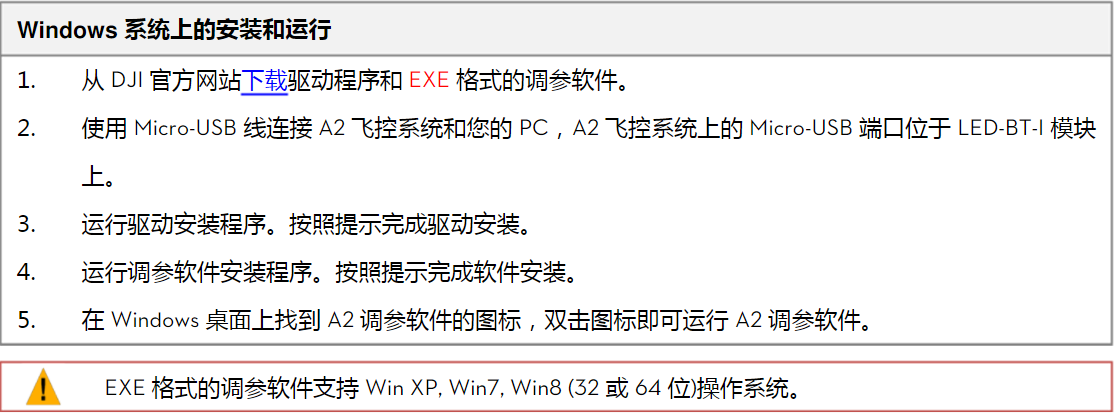
一:安装驱动程序和调参软件
要先在DJI官网下载软件。
下载完软件后,点击进去主界面
调参过程需要为系统供电,
注意:USB端口最多能提供500mA电流,则需要接电池供电。

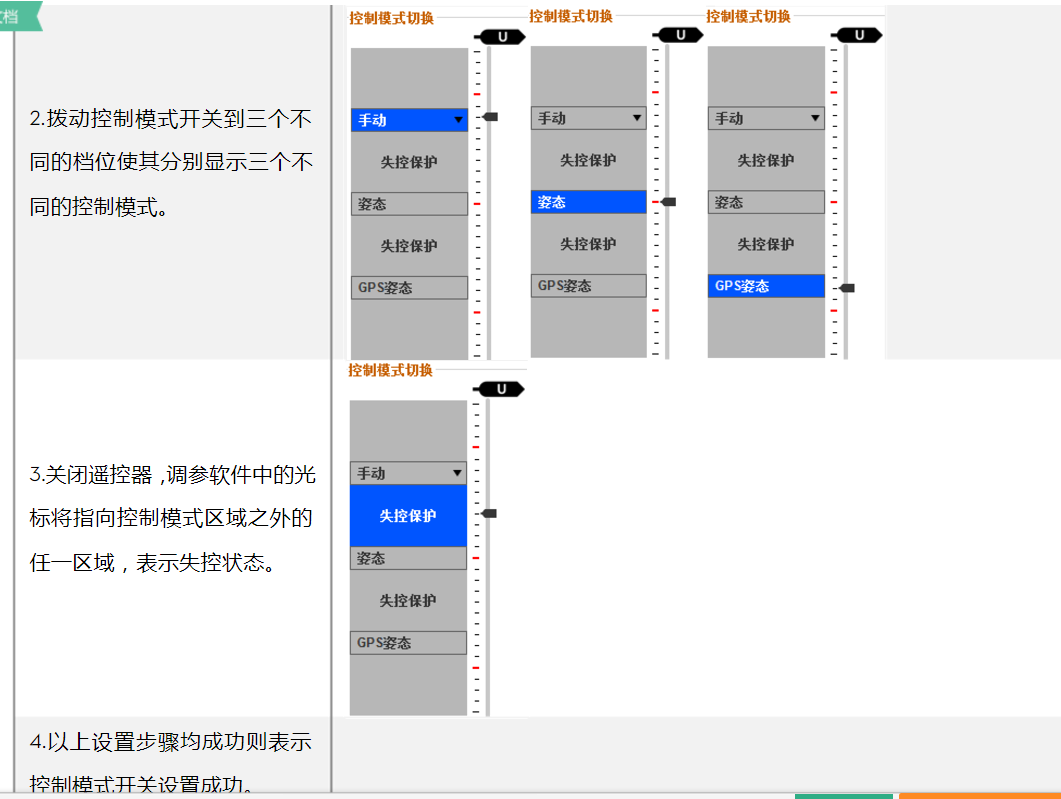
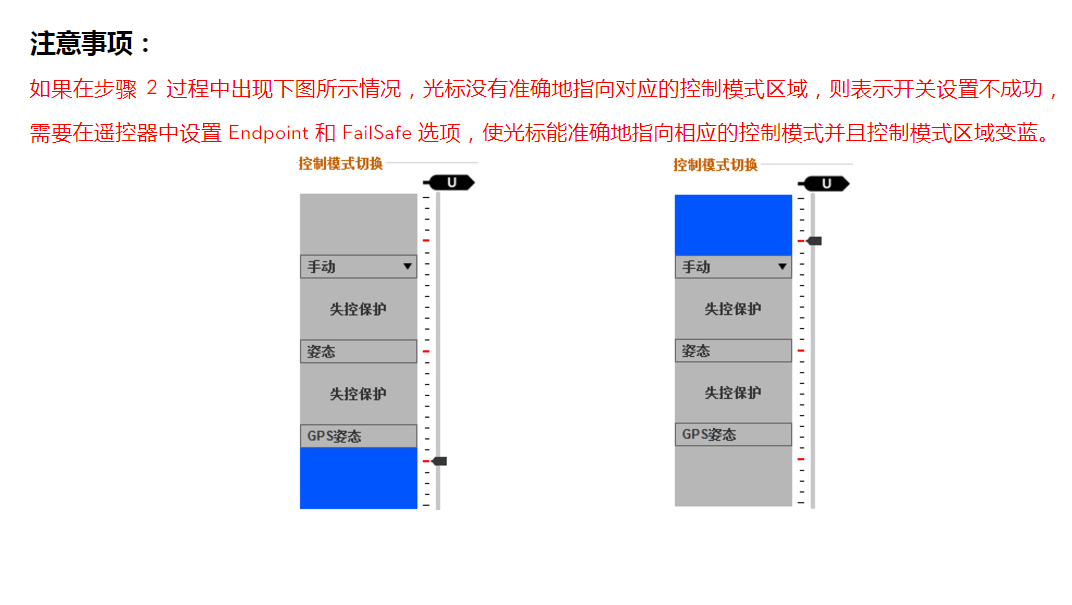
飞行控制模式


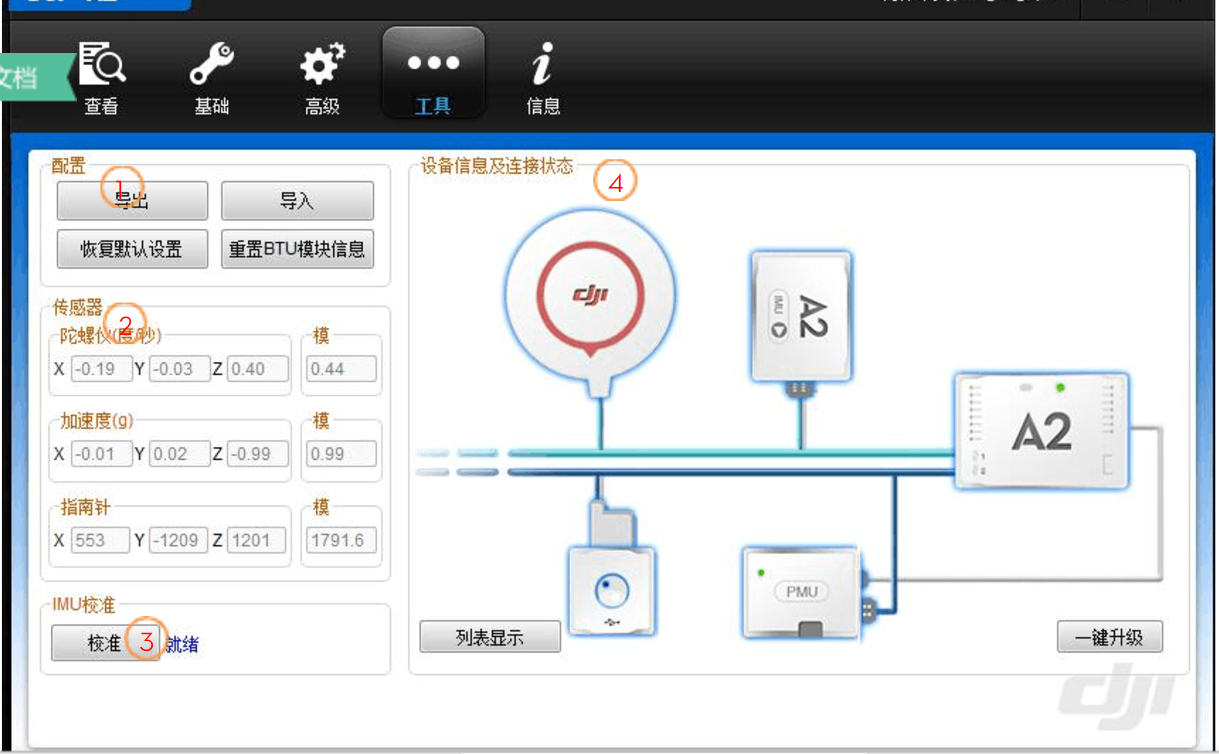
2、工具检查

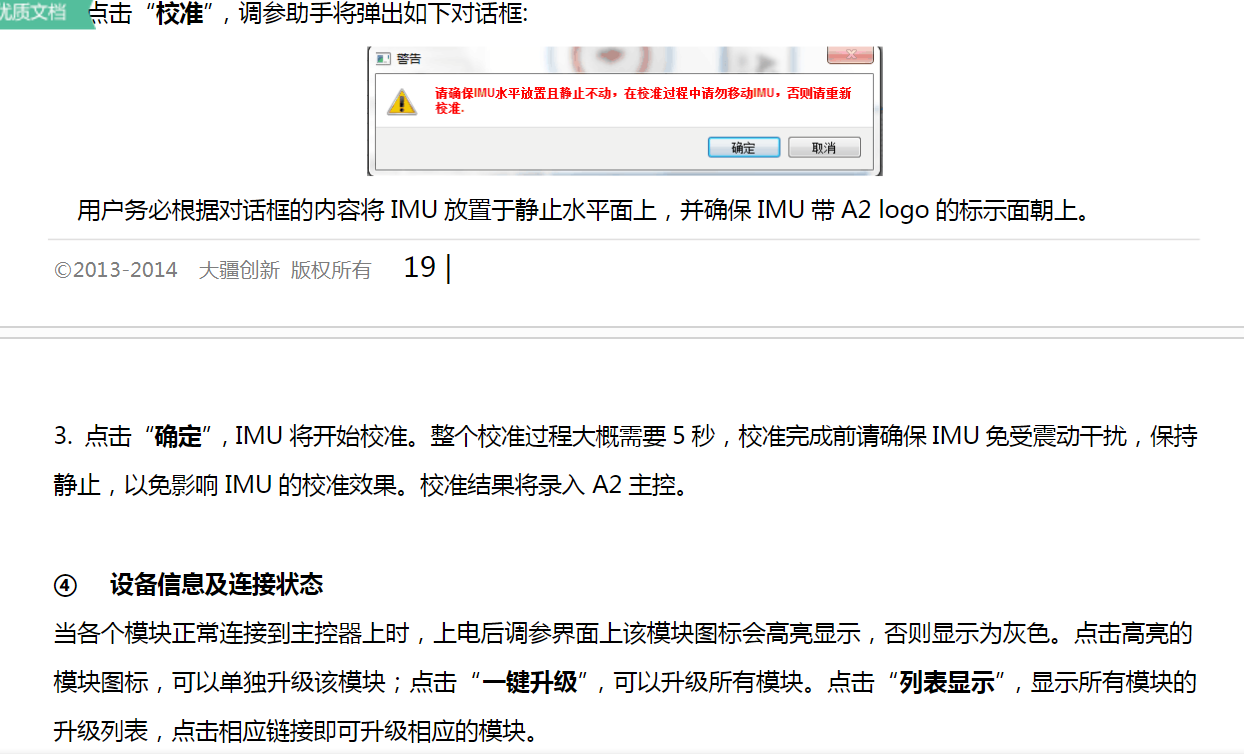
工具:调参系数的保存导出导入,陀螺仪、加速度计、指南针信息,IMU校准。
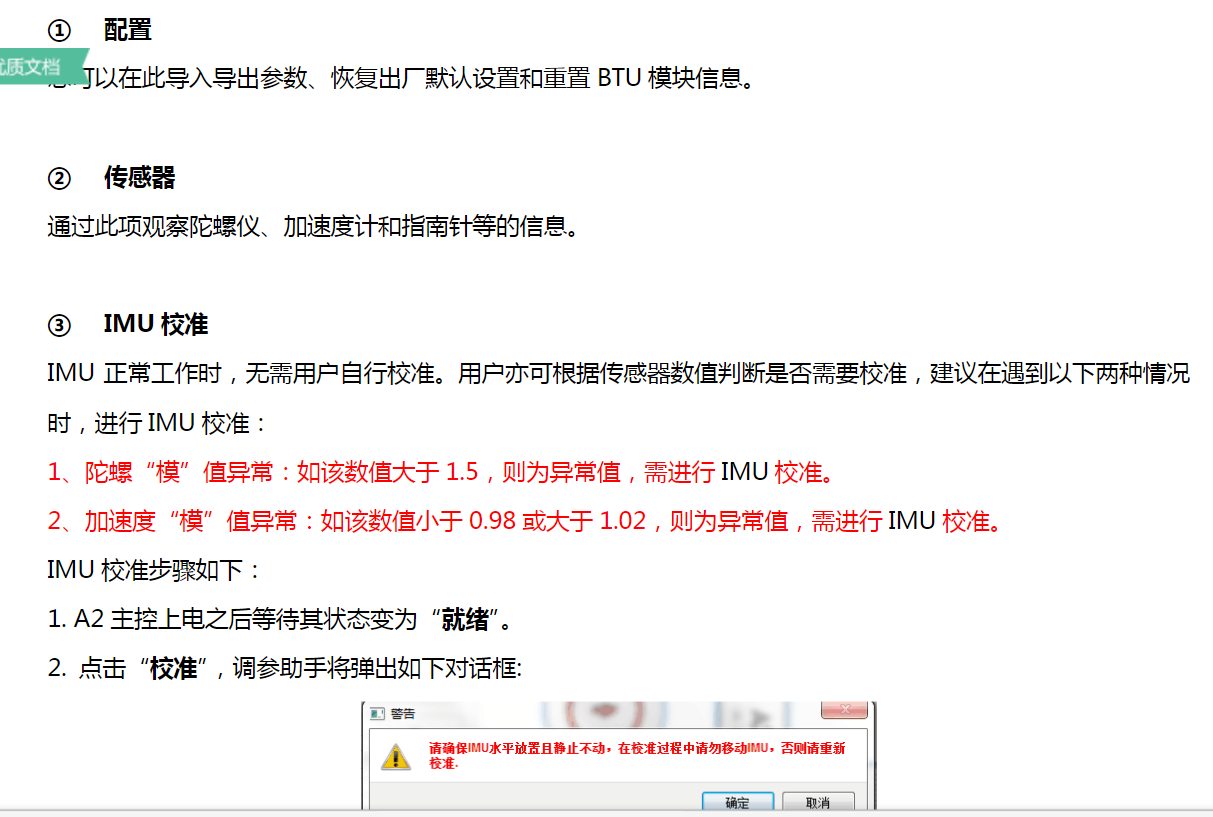
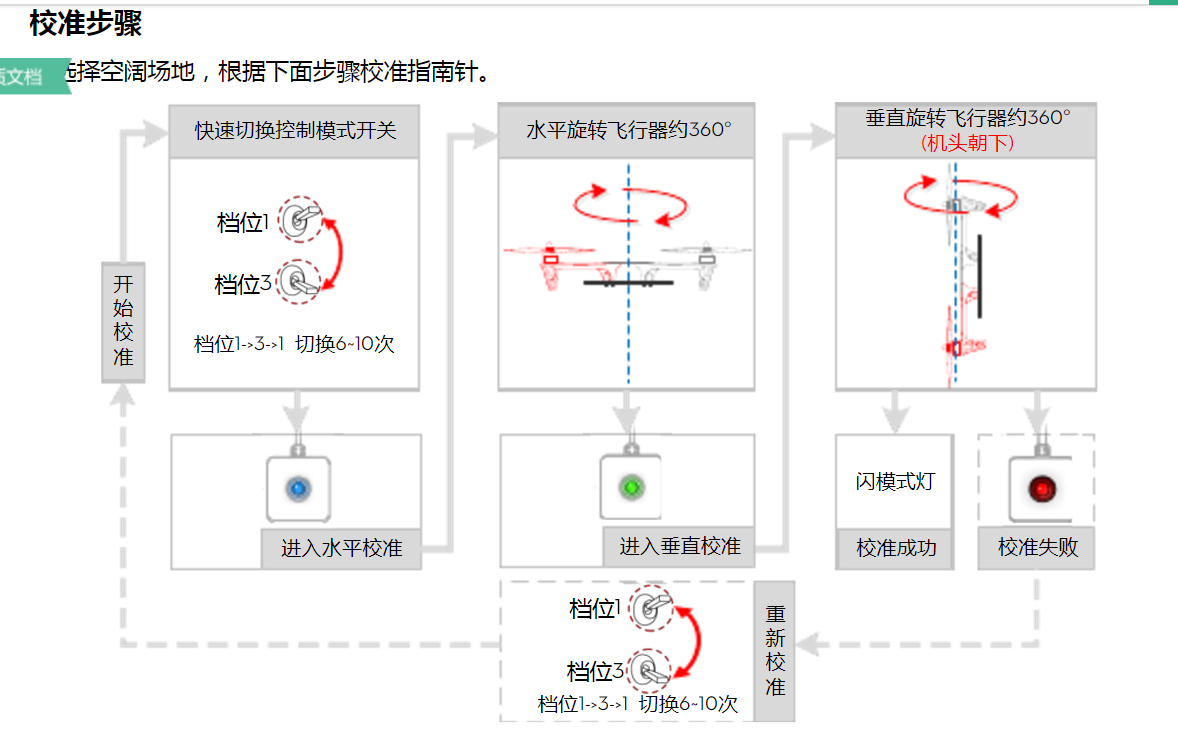
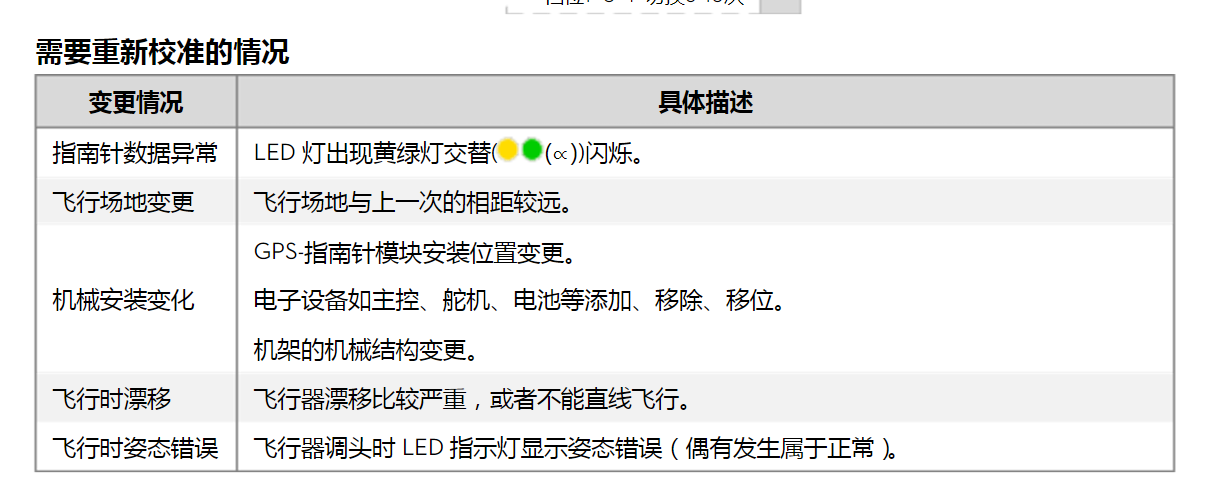
指南针校准:

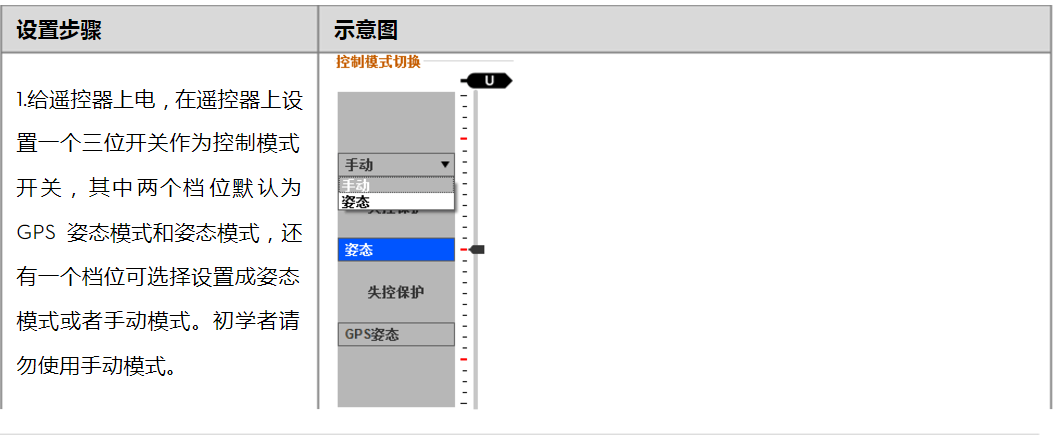
控制模式介绍:
GPS姿态模式:GPS信号强时使用,合适在场外空旷地方。
姿态模式:狭小空间,无GPS,仅能稳定姿态。
手动模式:紧急情况,重新拿回控制权
通电检查:通电后,GPS姿态模式显示紫灯,姿态模式显示黄灯,手动模式不显示。
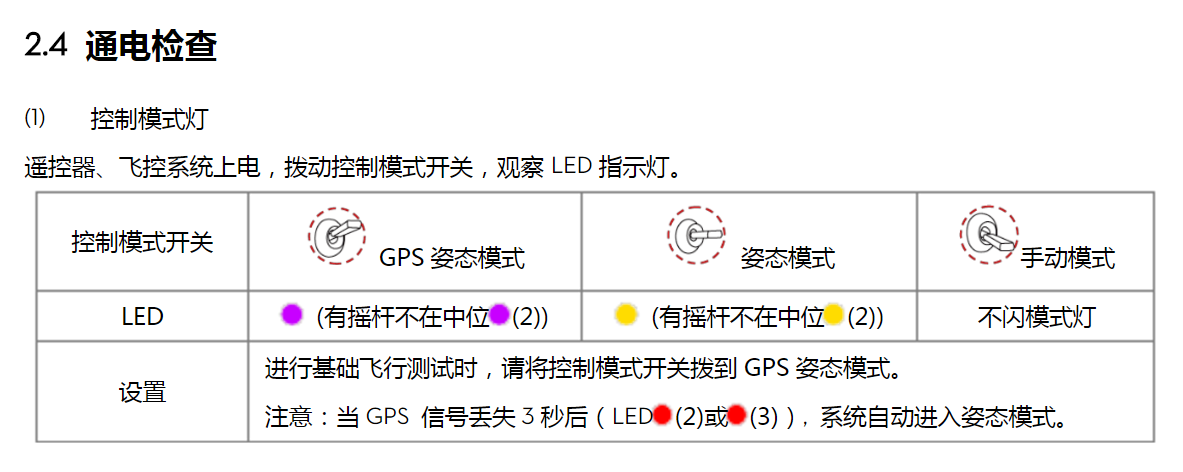
红灯一闪或不闪表明GPS信号强

注意:紫灯6快闪表明确定返航点位置。(记住了回家的路)

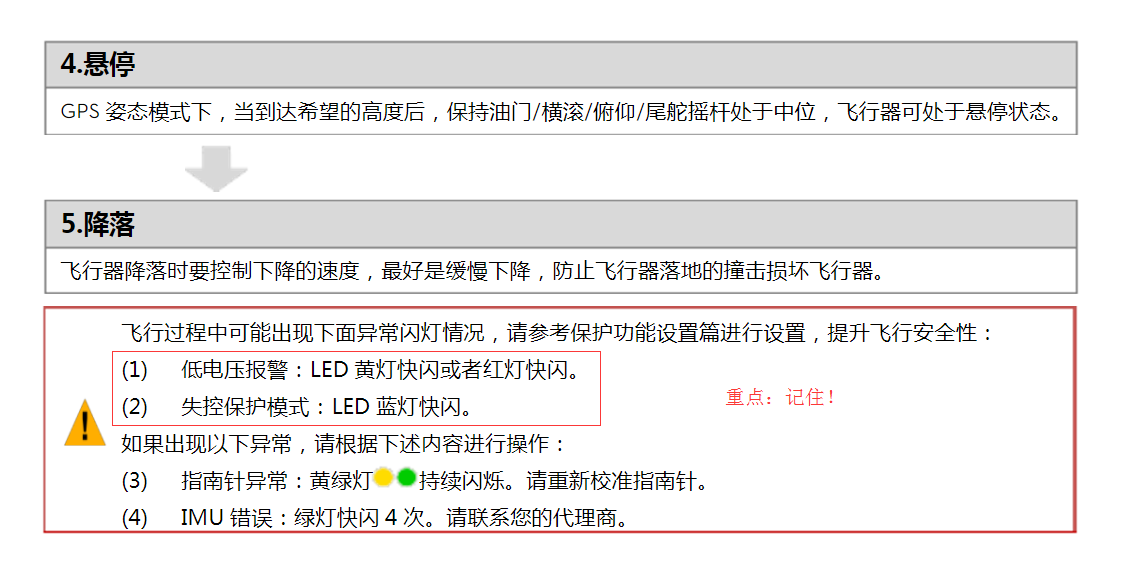
注意:低电压报警:LED黄灯快闪或者红灯快闪。
失控保护模式:LED蓝灯快闪。

等待GPS信号,红灯不闪推动油门杆,第一次启动电机起飞,飞控记录当前飞行位置作为返航位置。


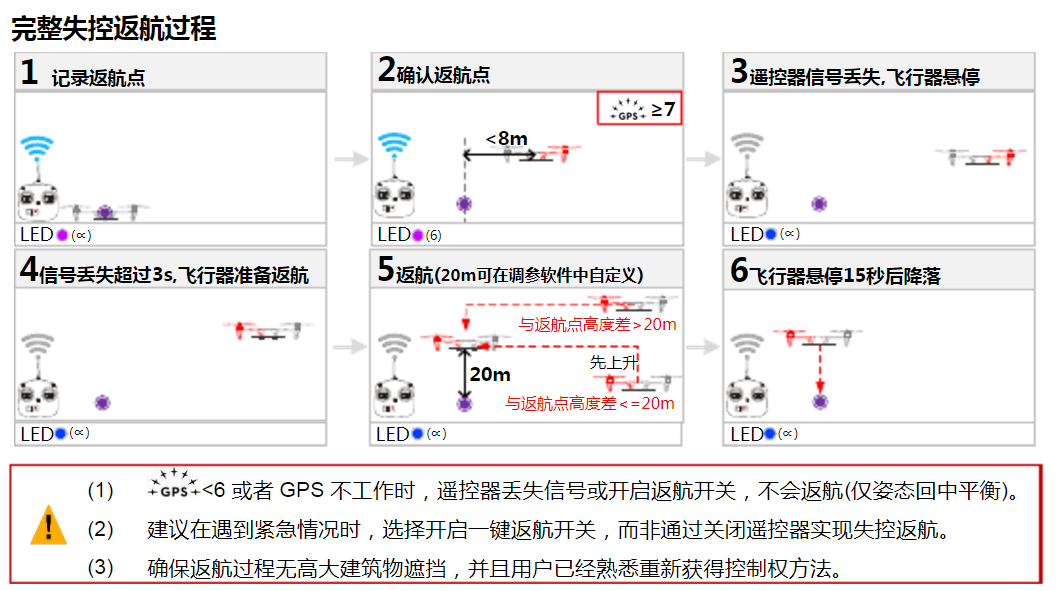
返航去过程:记录返航点——确认返航点——信号丢失,飞行器悬停——信号丢失超过3s,飞行器准备返航——升到指定高度——悬停15秒后悬停
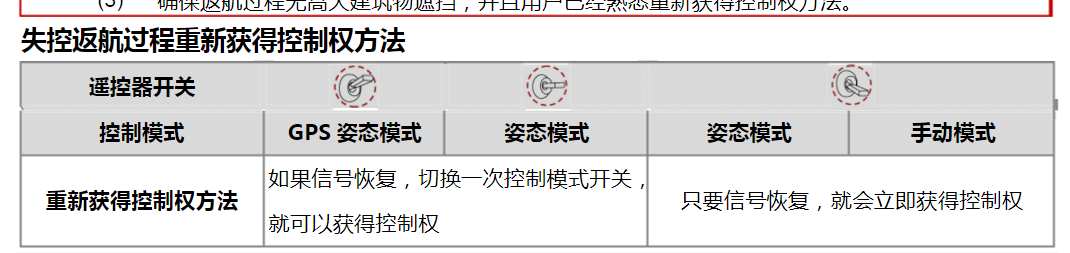
返航过程中如何夺回控制权?切换飞行模式